


Maytech.cn
In Stock Maytech MTSPF7.5H VESC DIY PCB Board for Efoil Mountainboard ROV Robotics No Case
In Stock Maytech MTSPF7.5H VESC DIY PCB Board for Efoil Mountainboard ROV Robotics No Case
No se pudo cargar la disponibilidad de retiro
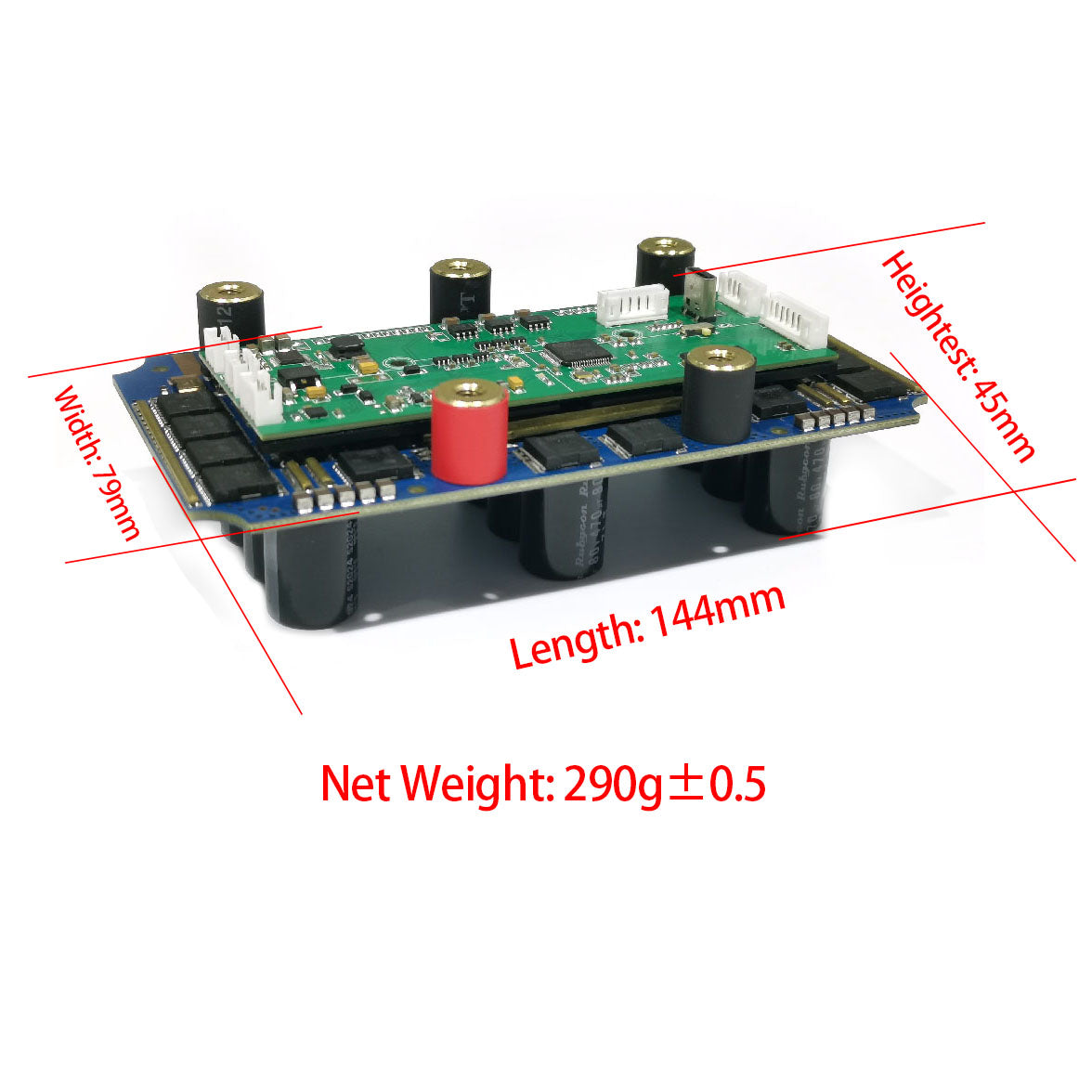
Maytech MTSPF7.5H VESC DIY PCB Board for Efoil Mountainboard ROV Robotics Underwater Scooter Electric Motorcycle No Case
|
Model no
|
MTSPF7.5H No Case
|
VESC Current
|
300A
|
|
Input Volt
|
5-18S Lipo (18V-75V) |
BEC
|
With
|
|
Watercooled
|
No, only PCB board
|
Hardware version
|
based on V75/300
|
|
Firmware
|
Upgradable
|
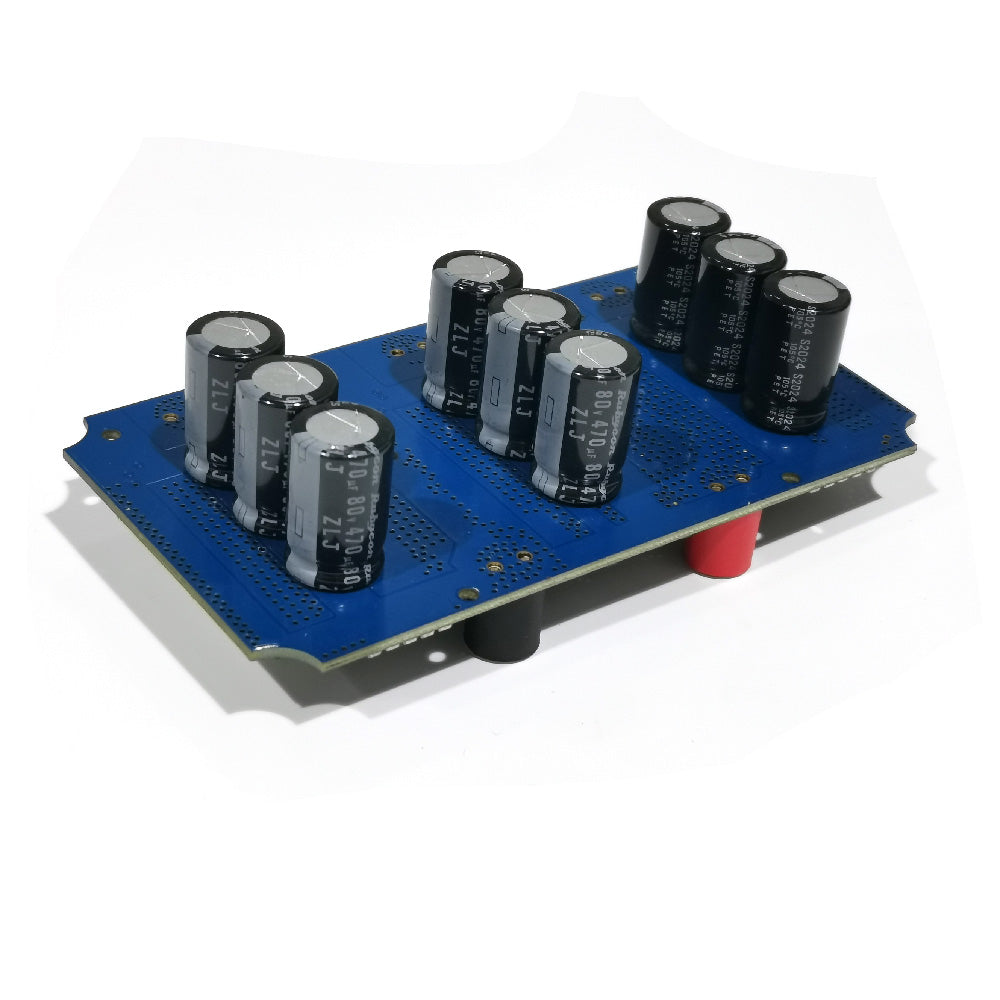
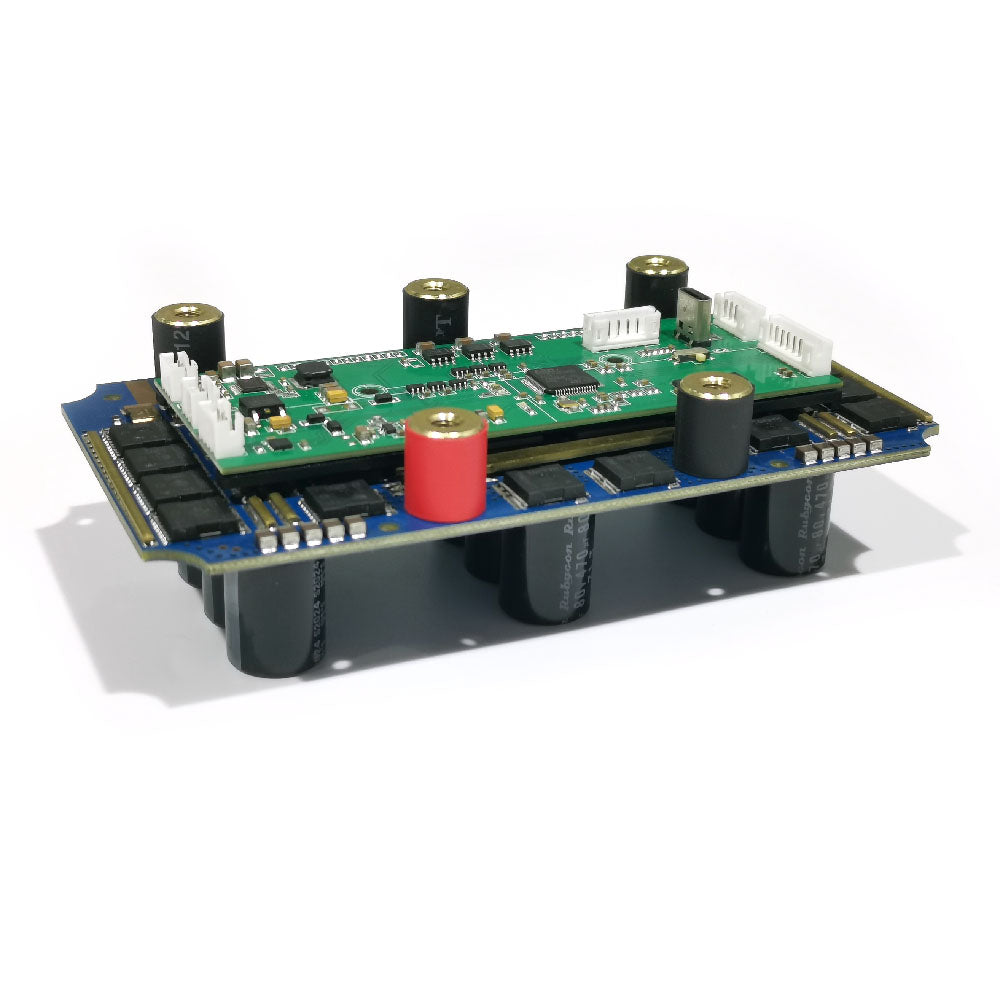
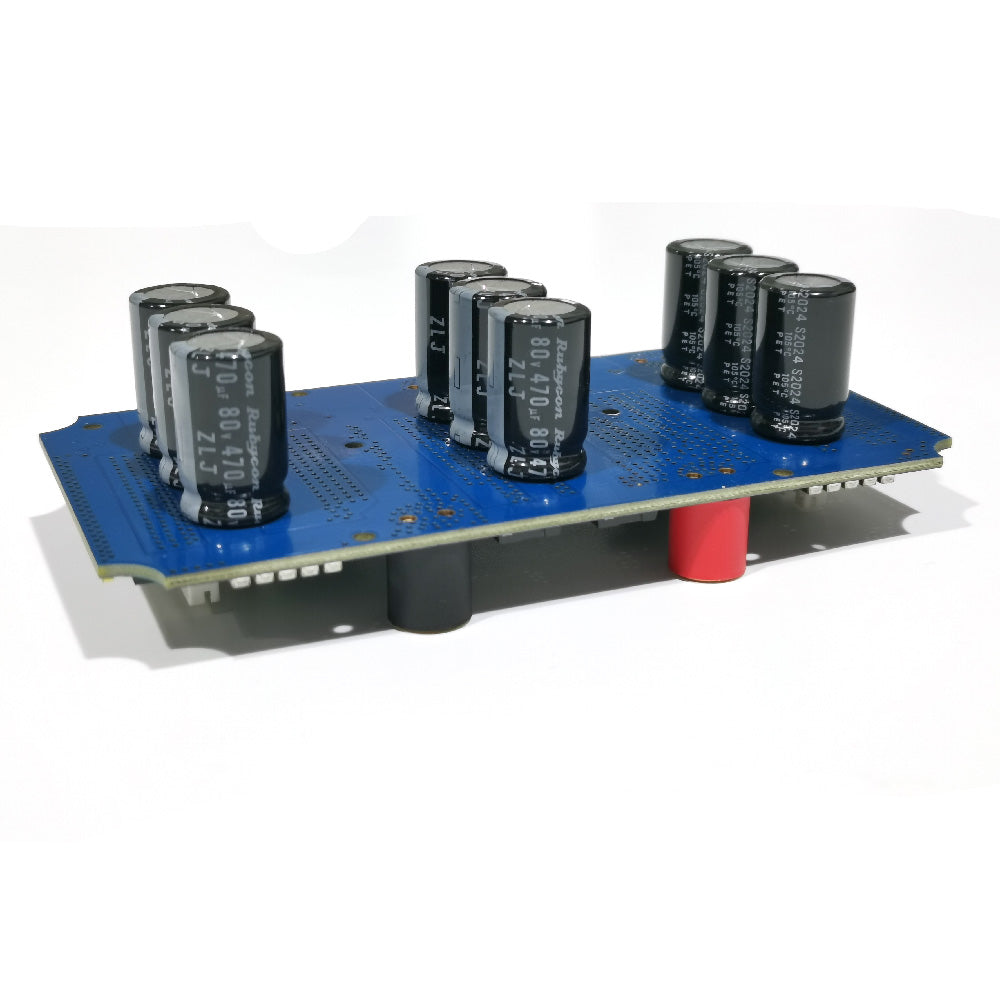
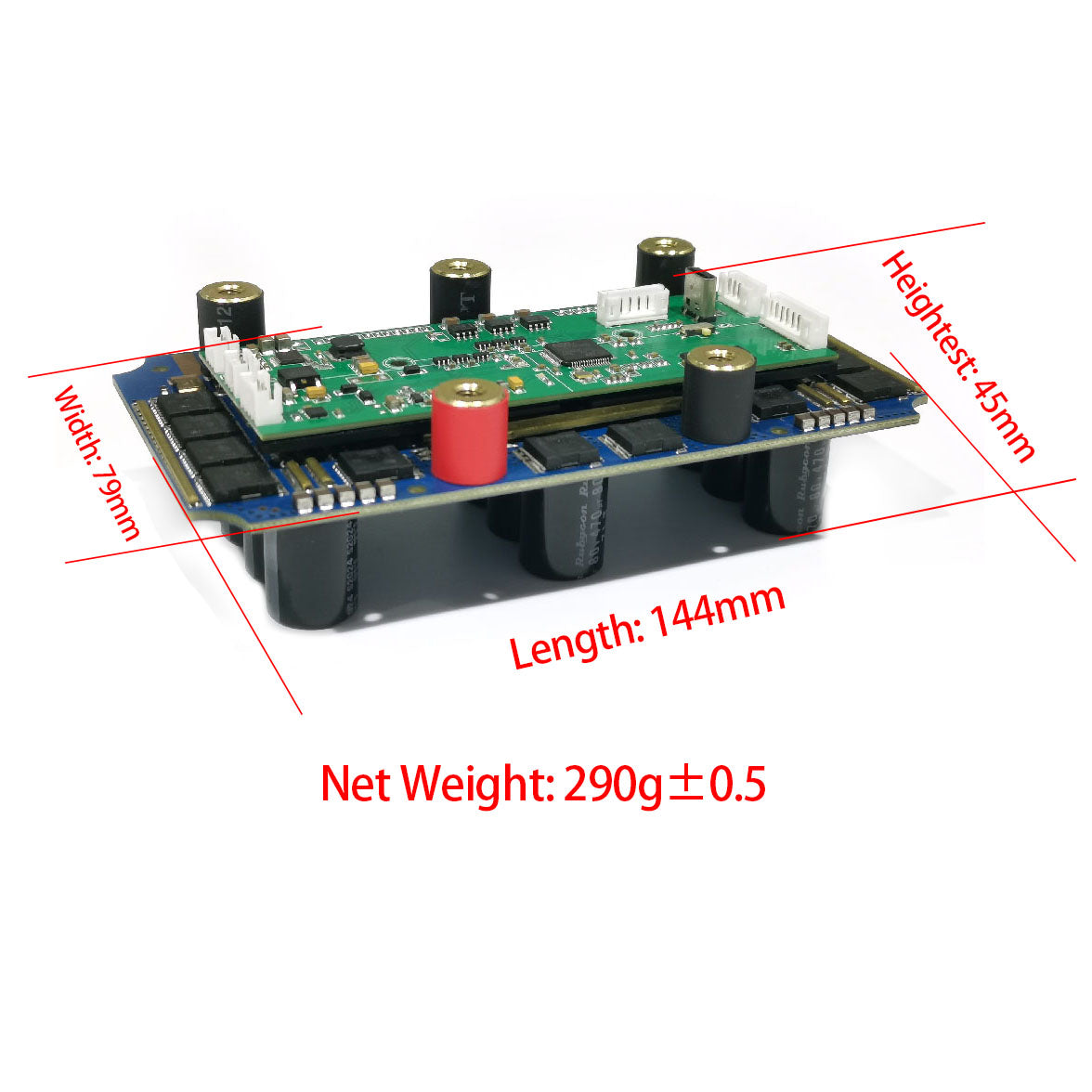
Capacitors
|
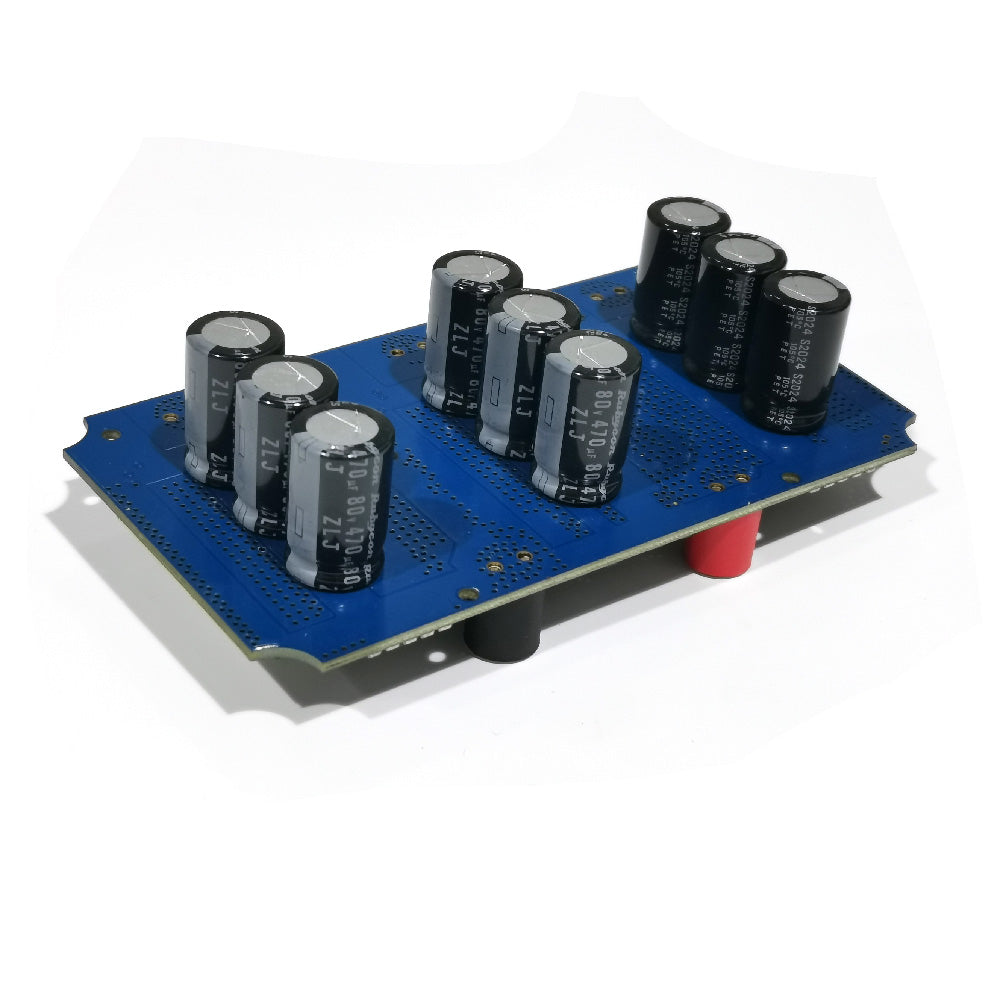
9pcs 100V 470μf capacitor
|
|
Application
|
electric skateboard, fighting robot, e-bike, electric motorcycle, efoil, electric surfboard, watercraft, electric boat, underwater ROV, etc
|
||
-Absolute Maximum Current: 350A (According to your motor current)
-Battery Current Max: ≤150A (According to your battery discharge current)
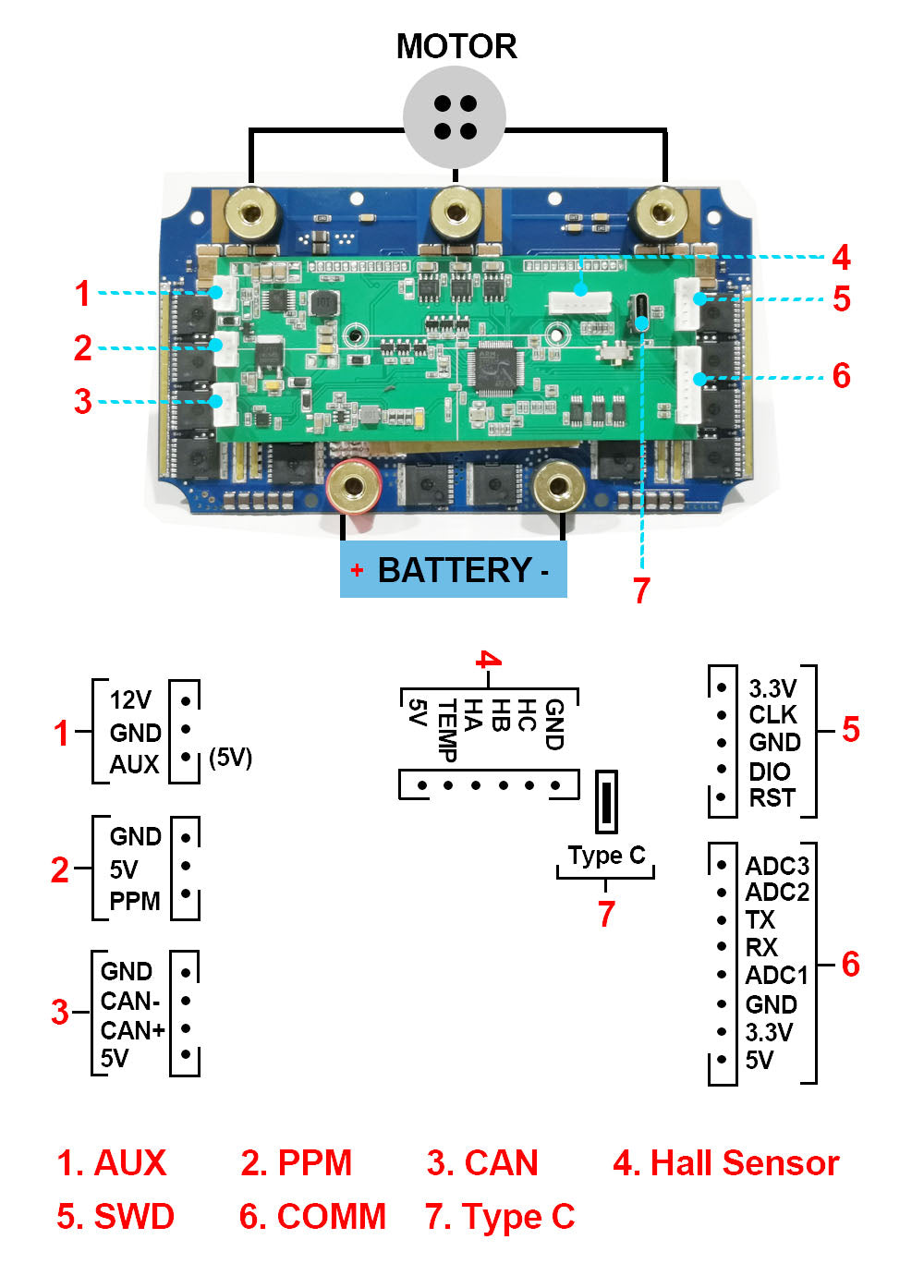
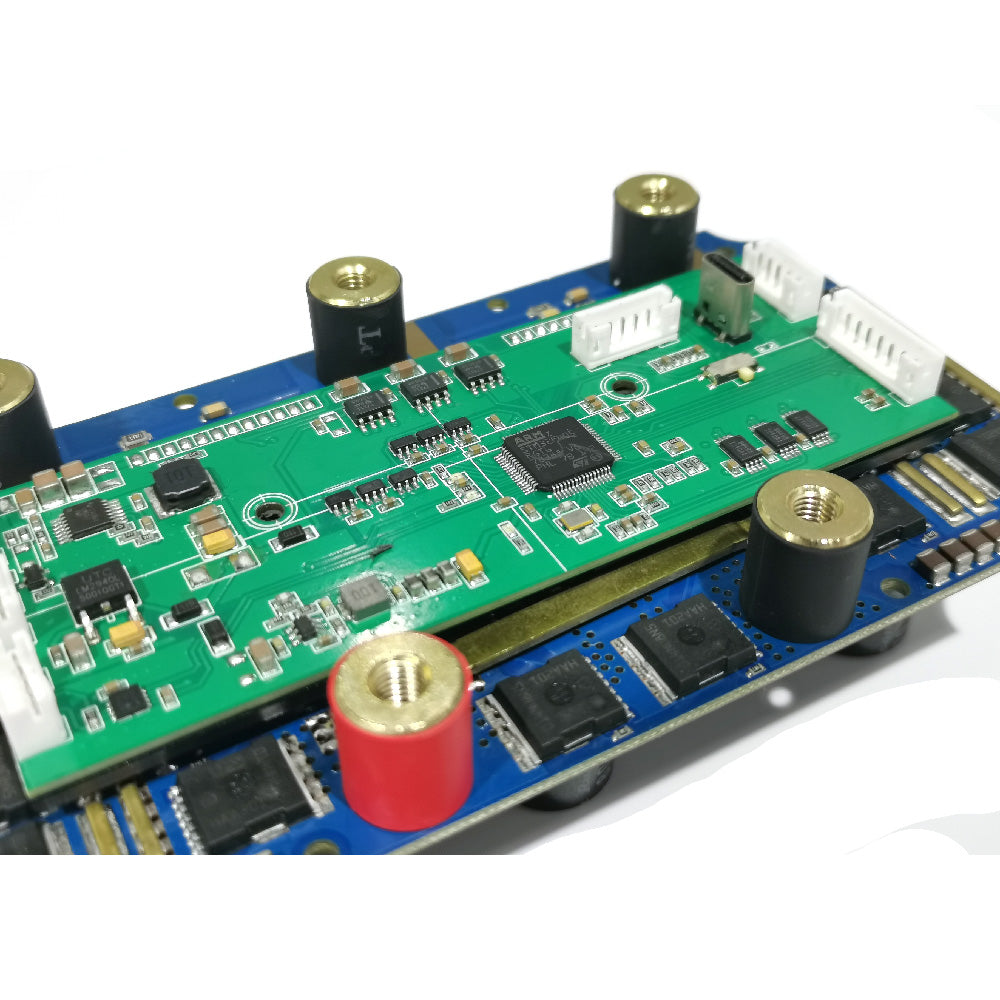
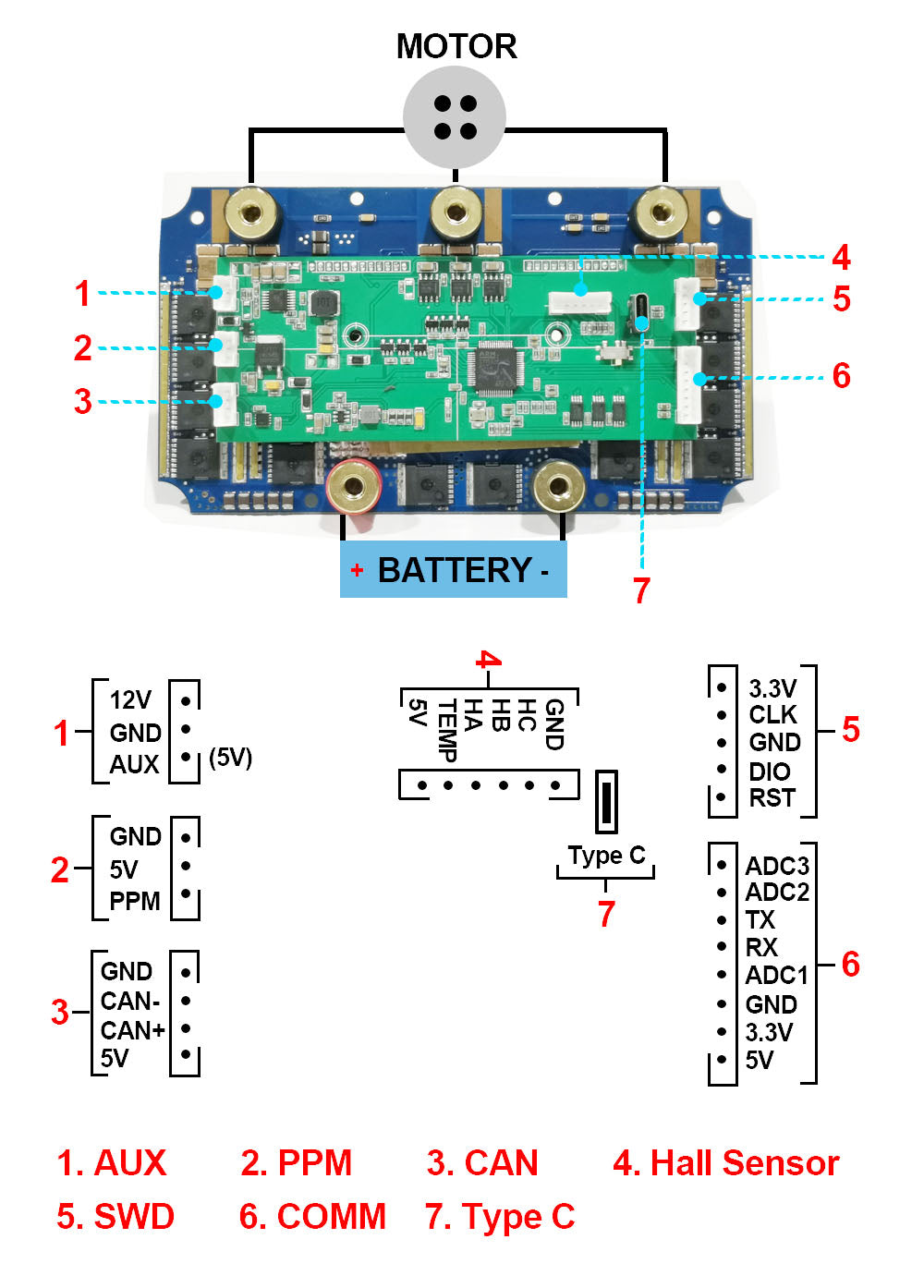
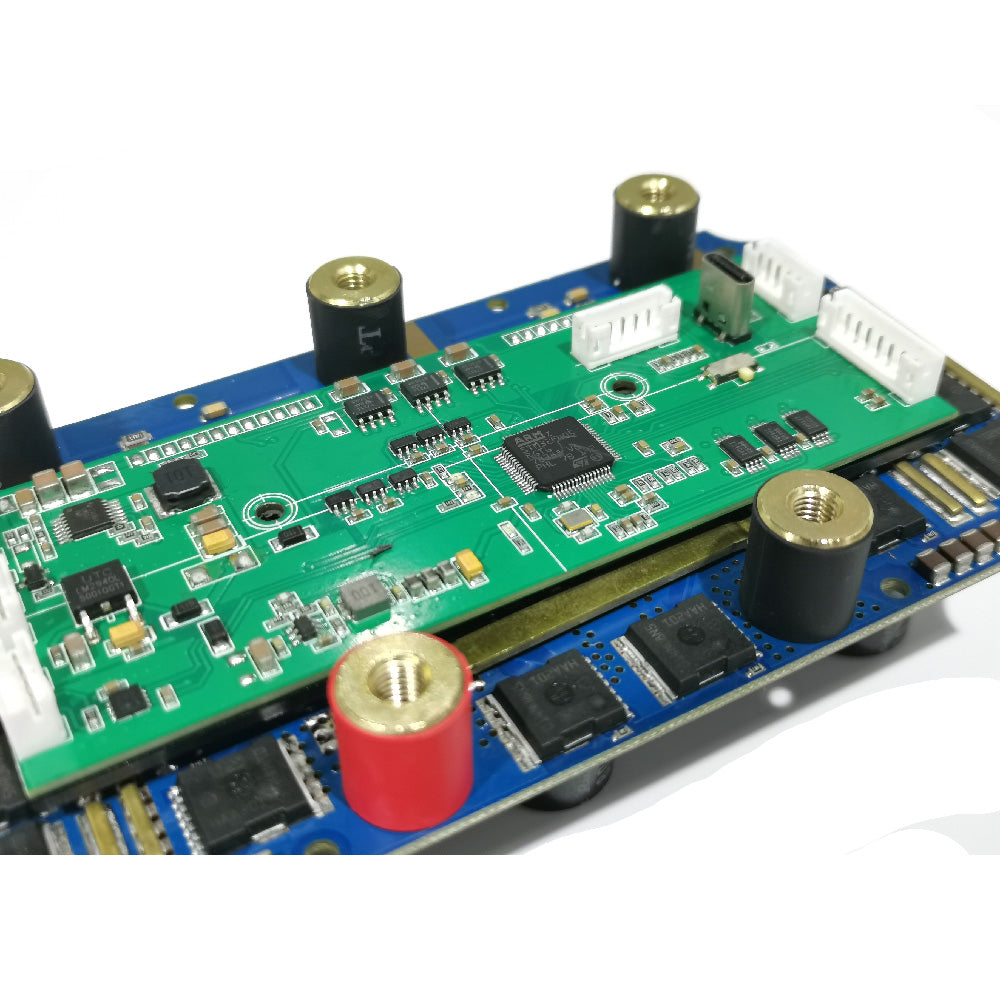
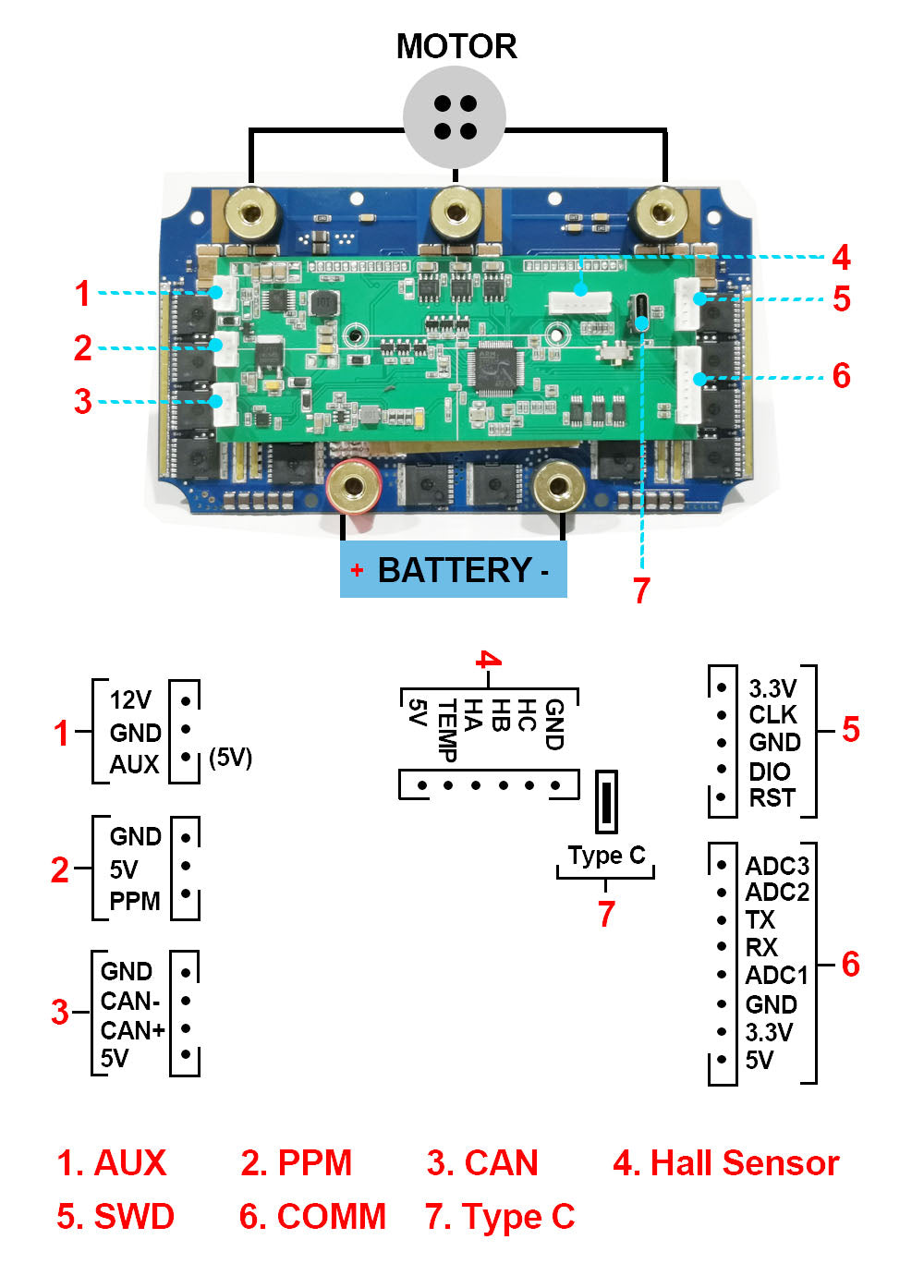
Ports definitions:
- AUX port to supply 12V and 5V to external device;
- PPM port to connect PPM transceivers; Never connect one reclever to two or more VESCs in an array ! Permanent damage may result from Y-PPM wiring
- CAN Port for CAN communication with other devices and controller arrays; Only connect CAN L and CAN H ! GND pins and 5V should never be connected in aVESC array.
- Sensor port for motor Hall sensors (ABI, HALL, magnetic precision encoders);
- SWD port to get direct access to the Chipset. Diagnostics, debugging, and real time data;
- COMM port for various kinds of other communication methods like I2C, ADC, Uart,you can use your Arduino or Raspberry Pi to control the SuperESC!
- USB port for programming.


Features:
Compare to Original 75_300 VESC_TOOL compatible controller, what upgraded points and advantages MTSPF7.5H have?
-
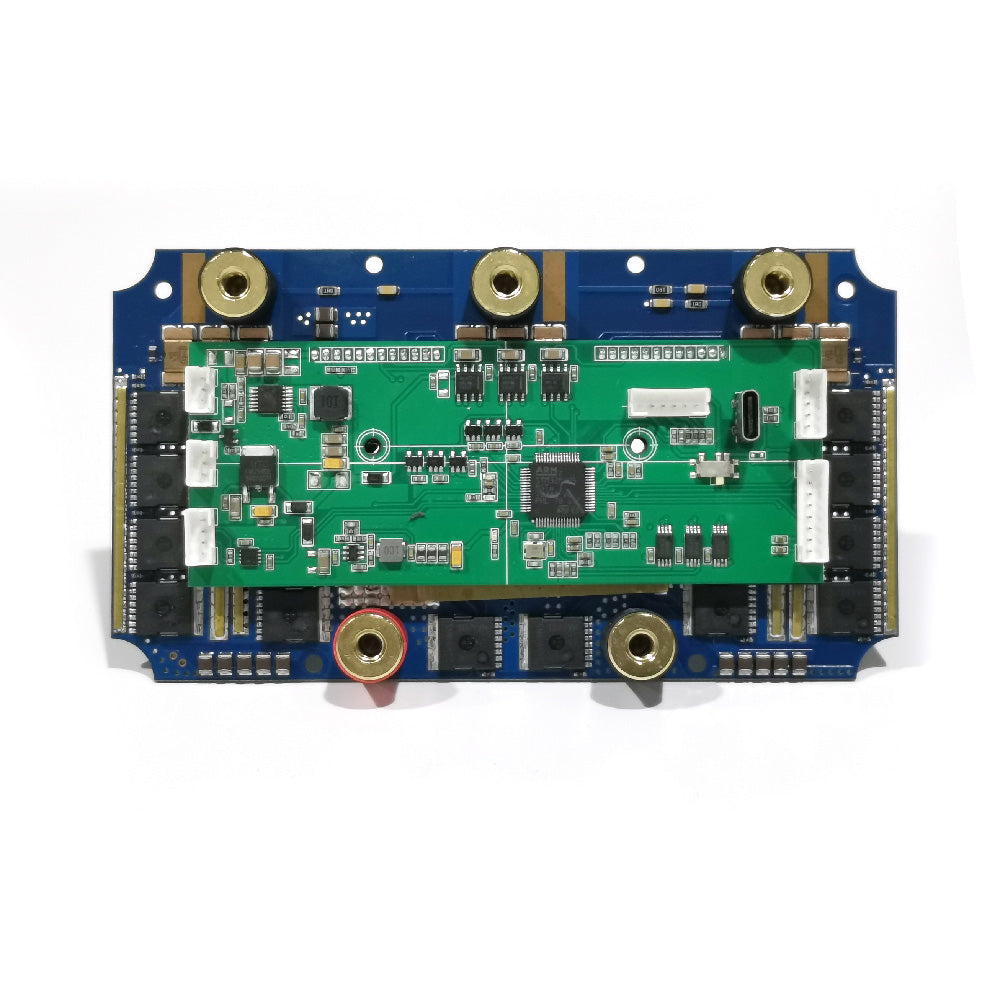
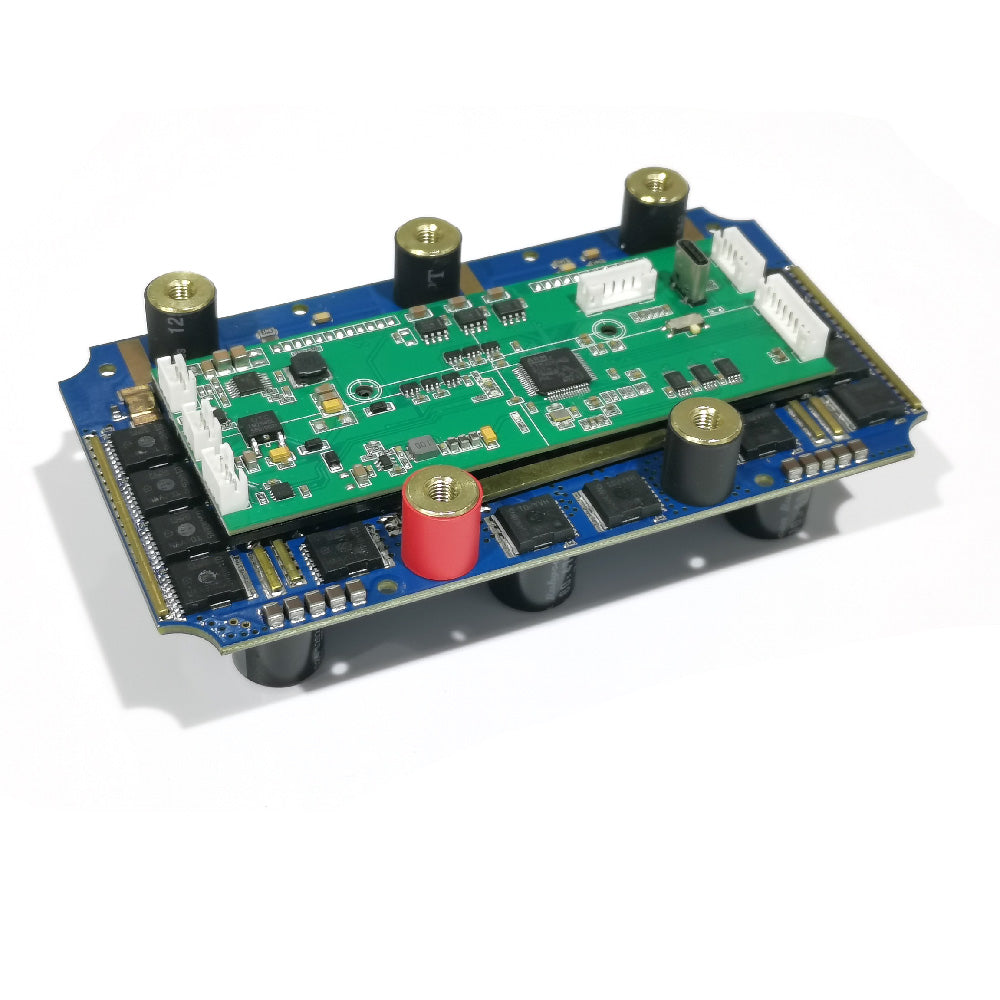
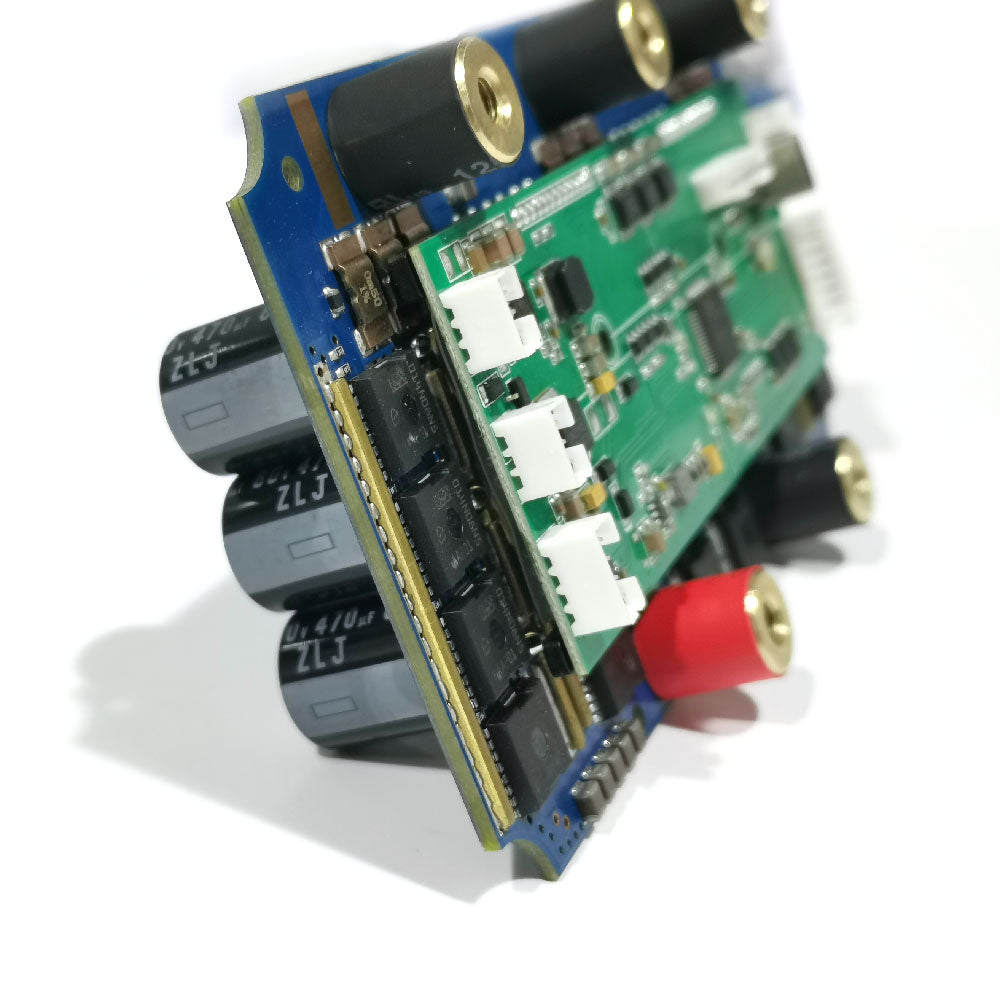
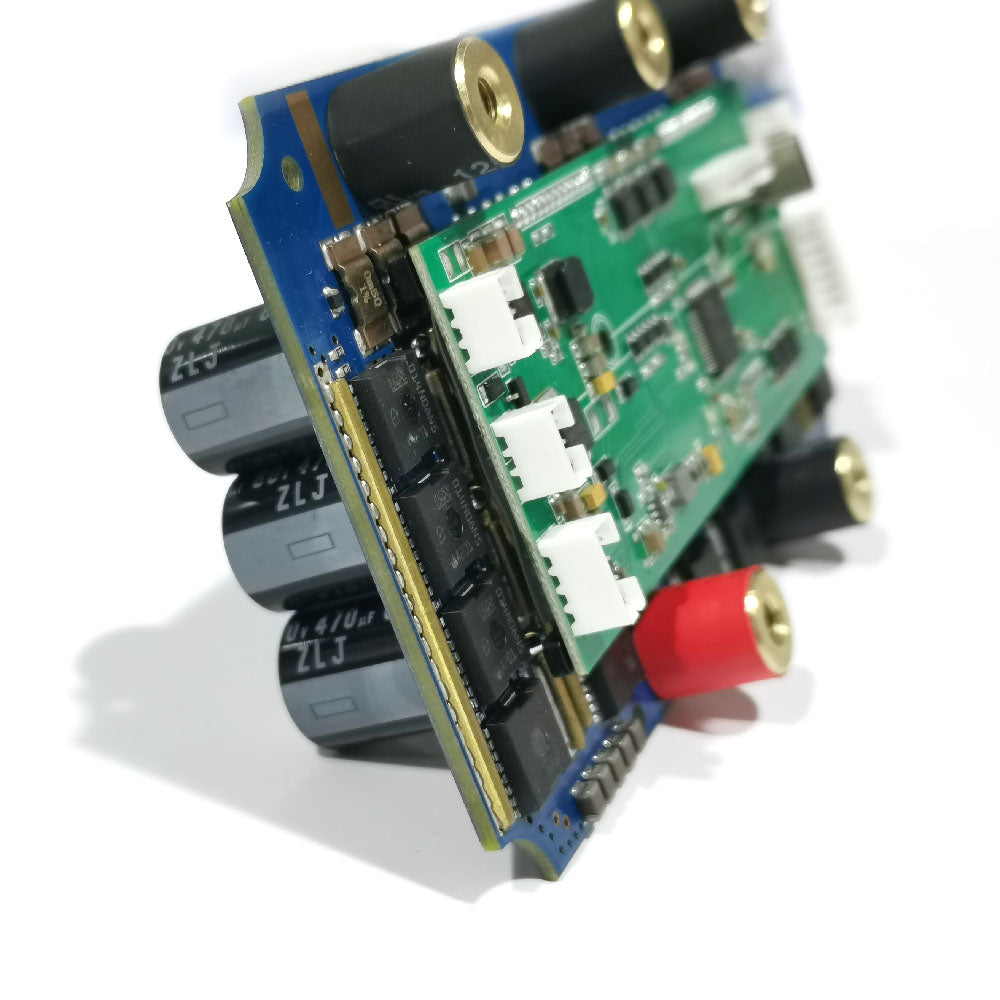
Its PCB board has 4pcs MOS paralleled, could withstand higher current, original version only has 3pcs MOS.
-
Its PCB board with cooper stripe, can reduce resistance in high current, better heat dissipation.
-
With larger capacitor, 9pcs 100V 470μf capacitor, while original version only has 6pcs 80V 470μf.
-
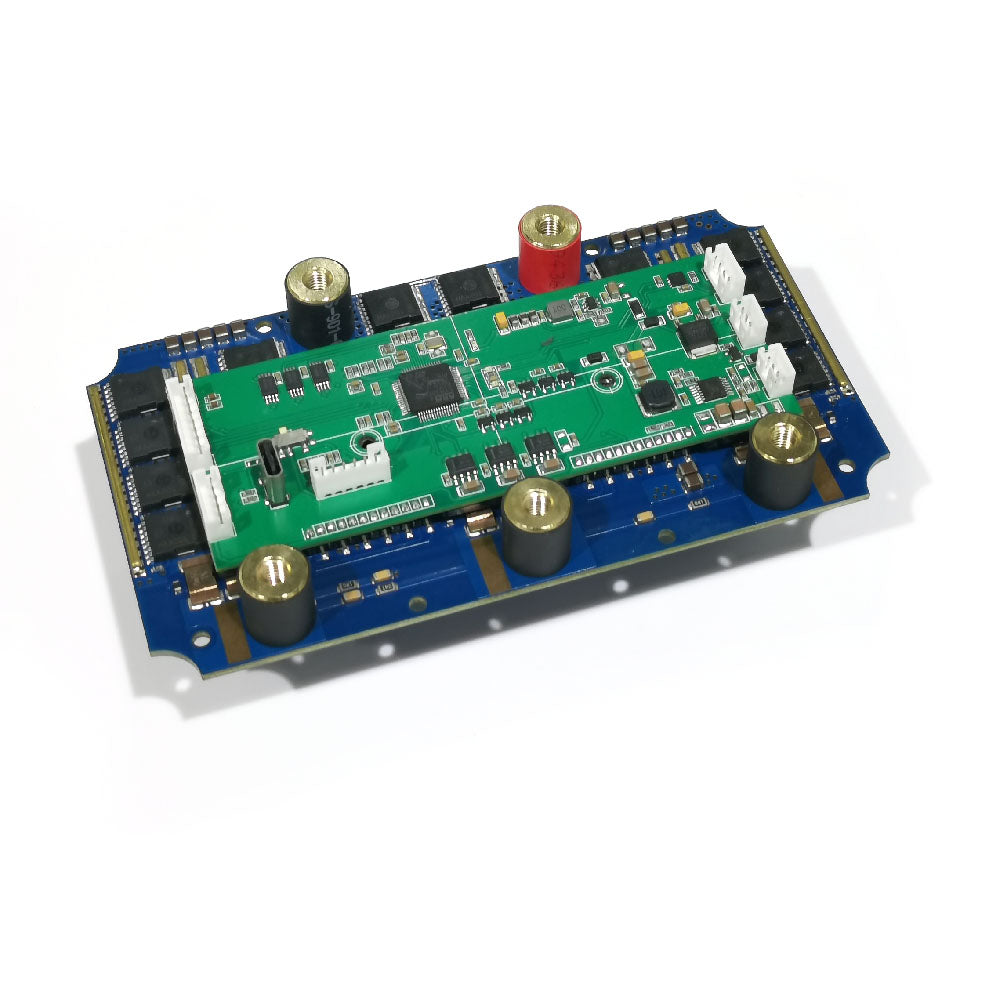
With separate design of strong and weak current circuit board, and between 2 boards added heat sink for better heat dissipation.
-
Exclusive 5V and 12V external power supply interfaces will not cause interference when powering analog circuits such as twist/thumb throttles.
Some Using Tips for this SUPERFOC Controller:
2.Must do a good job of heat dissipation! If place it in a sealed container(recommend touse metal container), it must be forced to be cooled with water. Also make sure your container has enough space for the controller, make sure the cooling tube do not bent, otherwise will influence water flow in cooling tube, also make sure water flow is enough for cooling before office use.
3. Before the new ESC is officially used, please test it with a low-voltage and low-throttle, after success, then slowly increase voltage and throttle. Be sure to pay attention to safety during this period!
4. Recommend to add an electronic switch with short circuit protection function between the ESC and battery, such as MTS2009AS 300A electronic switch or BMS with switch function. It is not recommended to use only contactor without short circuit protection!
5. The battery and motor side terminals must be connected tightly, they can’t be loose. Also please make sure terminals not touch case or other wires, here's the video shows you the way to install cold-pressed terminal connector: https://youtu.be/unFfV9RPPCc
6. In actual use, please use hot melt glue to fix the hall/UART interface cables the corresponding sockets of the ESC, to prevent the cables loose due to the bumps of the vehicle!
7. Please do not disconnect relay switch or electronic switch during usage ! Otherwise it will cause electromagnetic interference, which might damage the controller.
Our remote PWM signal output pulselength in Esurf mode is 1-2ms, no brake no stop, and in controller default pulselength is 1ms start, 2ms end, 1.5ms center, so if you will use our remote in Esurf mode, then please adjust below settings in VESC_TOOL:
PPM Control Type: Current no reverse
PPM Mapping: Pulselength Start: 1.1ms; Pulselength End: 1.9ms; Pulselength Center: 1.5ms

9. In PPM Control type, do not use Duty Cycle or Duty Cycle No Reverse, this control type only works at fighting robots, 3F Prototyping, drone application, because this control type can't fully disconnect battery power, it needs battery to absorb braking energy.
Videos show you how to connect cables to the controller cold-pressed terminal connector:
If you want watercooled or waterproof version, click below pictures:



Water Pump Set for Water Cooling System:

Maytech Electric Surfboard / Efoil Kits:

Maytech MTSKR1905WF IP67 Waterproof Remote for Esk8/Esurf: